
Function
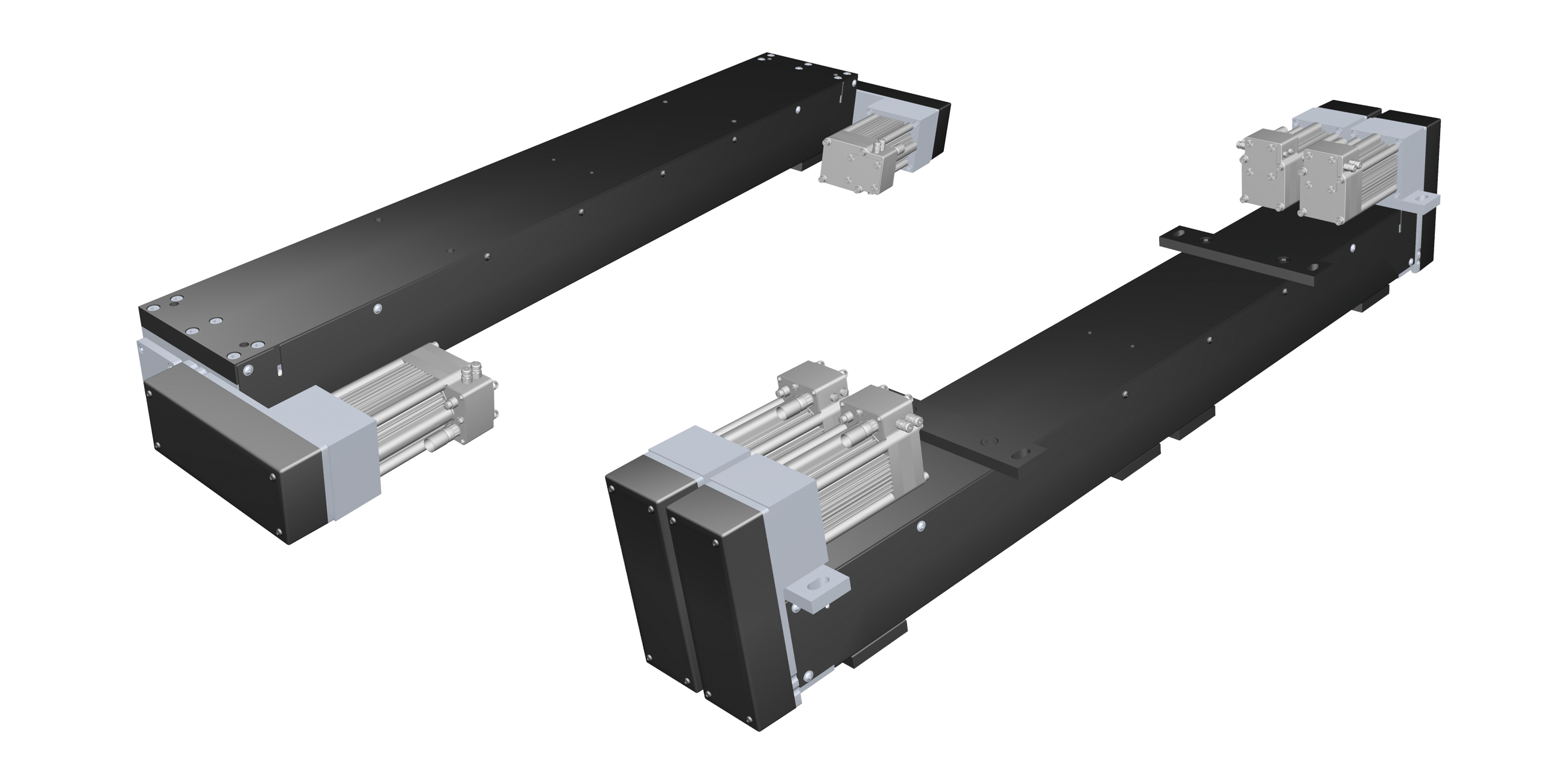
With follow-up control, the sensor and tool are mounted jointly on a linear guide. Here, the sensor detects the position of the web and thus determines the target position value of the tool. This is compared with the actual value and a correction signal is output to the actuator. As a result, the tool is always followed up with a constant distance to the guide reference.
Area of use
Follow-up control systems are used when processes such as coating or cutting must be executed with a constant distance to the web edge or to a guide reference on the web.
Application
The highest control accuracy is reached when the sensor and tool (doctor blade limitation) can be assembled in compact form on a linear unit. Edge detection always takes place in front of the tool, in the direction of web travel.