
- 설명
- 기능 도면
기능
웹 가이딩에 사용되는 스티어링 롤러 시스템 ELROLLER는 인피드 영역에서 이미 웹 위치를 보정합니다. 이 시스템은 고정식 베이스 프레임과 이동식 가이드 프레임으로 구성되어 있습니다. 이 이동식 프레임은 하나 또는 2개의 조절 롤러를 지지하고 인피드 면에 있는 가상의 회전점을 중심으로 선회합니다. 스티어링 롤러는 비례식 액추에이터라고 불리며, 따라서 이것은 충분한 마찰력으로 작동해야 하며 웹과 조절 롤러 사이에서 미끄러짐은 허용되지 않아야 합니다.
사용 영역
웹 가이딩을 위해 ELROLLER 시스템은 공정 기술상의 이유에서 이미 긴 인피드 경로가 존재하는 곳에서 사용됩니다.
어플리케이션
현장의 공간적 상황에 따라서 웹 가이딩을 위해 스티어링 롤러에는 하나의 조절 롤러(웹은 90° 랩으로 가이드됨) 또는 2개의 조절 롤러(작은 랩 각도 가능)가 장착될 수 있습니다. 웹 가이딩을 위한 ELROLLER의 장착을 위한 전제조건으로서, 인피드 길이는 웹 폭의 2배~3배여야 하며, 아웃피드 길이는 웹 폭의 50~100%여야 합니다. 센서는 조절 롤러 뒤에 최대한 인접하게 배치해야 합니다. 이로써 짧은 반응 시간 및 더 빠른 수정 속도를 달성할 수 있습니다.
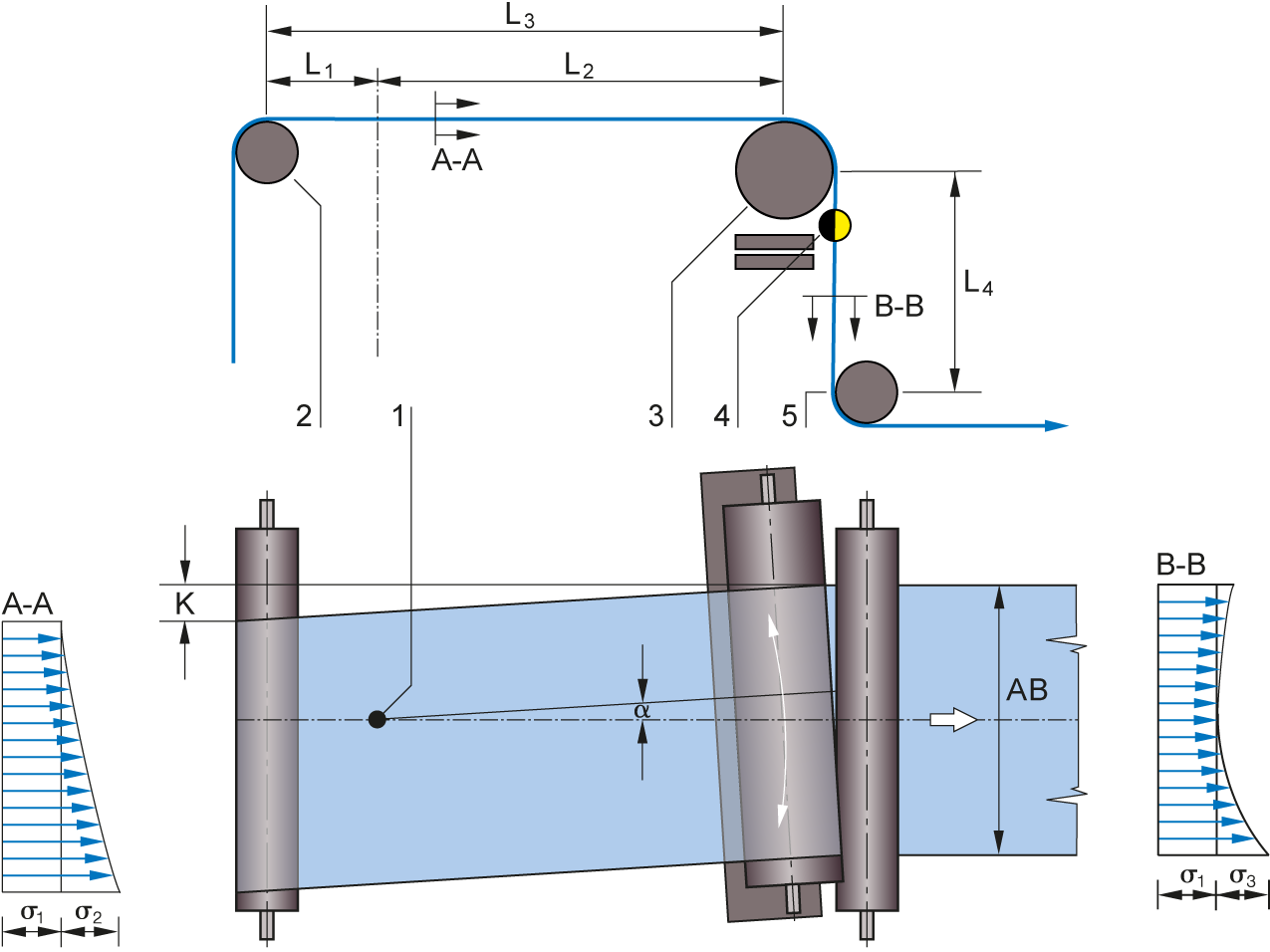
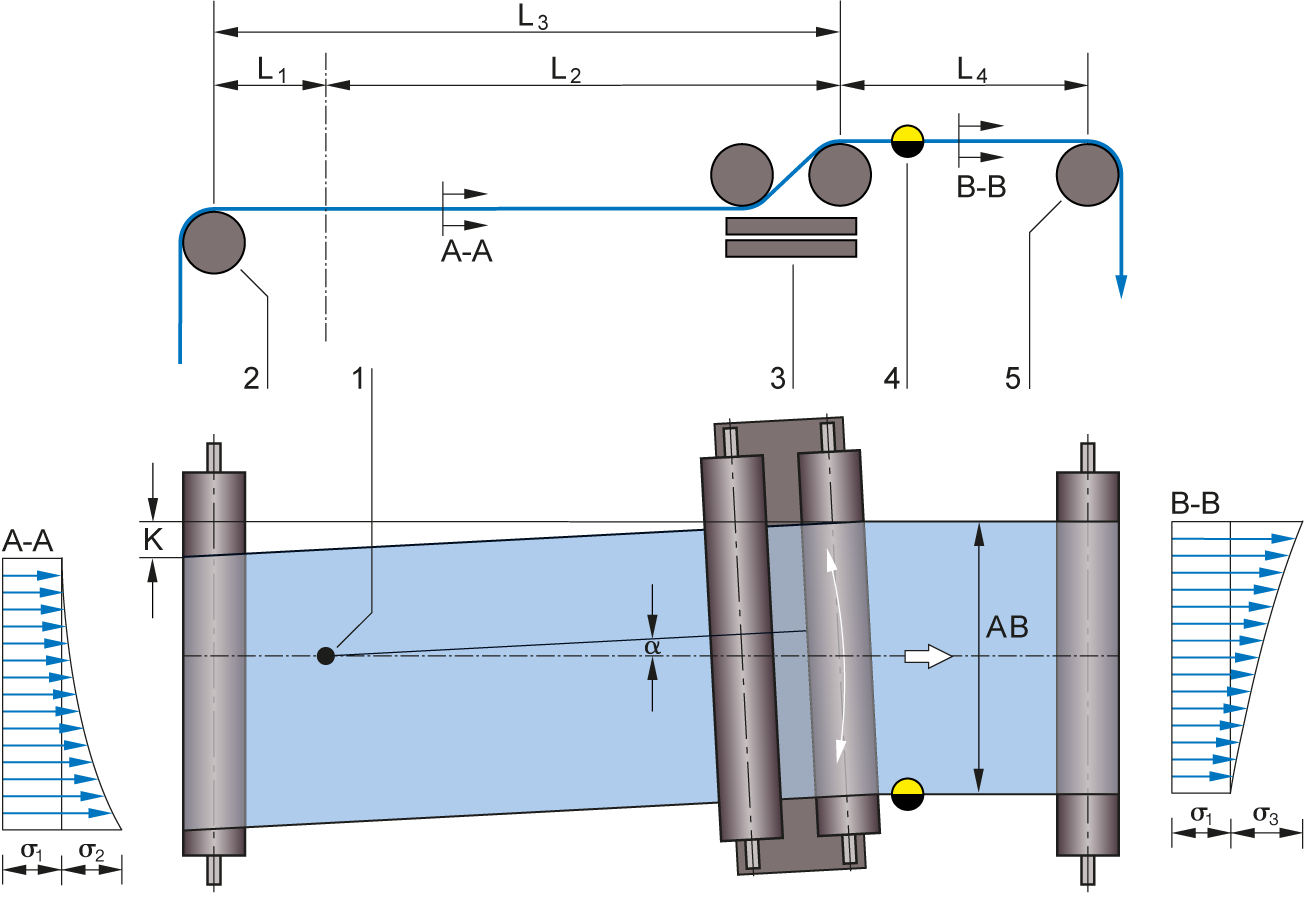
범례
A = 인피드에서 웹 장력 분포 | B = 아웃피드에서 웹 장력 분포 | K = 웹 경로 수정 | a = 수정각 | σ1 = 웹 기본 장력 | σ2 = 인피드에서 롤러 프레임의 피버팅 동작을 통한 장력 분포 | σ3 = 아웃피드에서 롤러 프레임의 피버팅 동작을 통한 장력 분포 | 1 = 회전점 | 2 = 인피드 롤러 | 3 = 조절 롤러(들) | 4 = 센서 | 5 = 고정 롤러 | L1 = 회전점에 대한 인피드 길이 | L2 = 스티어링 롤러에 대한 회전점 인피드 길이 | L3 = 인피드 길이 | L4 = 아웃피드 길이













