
- 설명
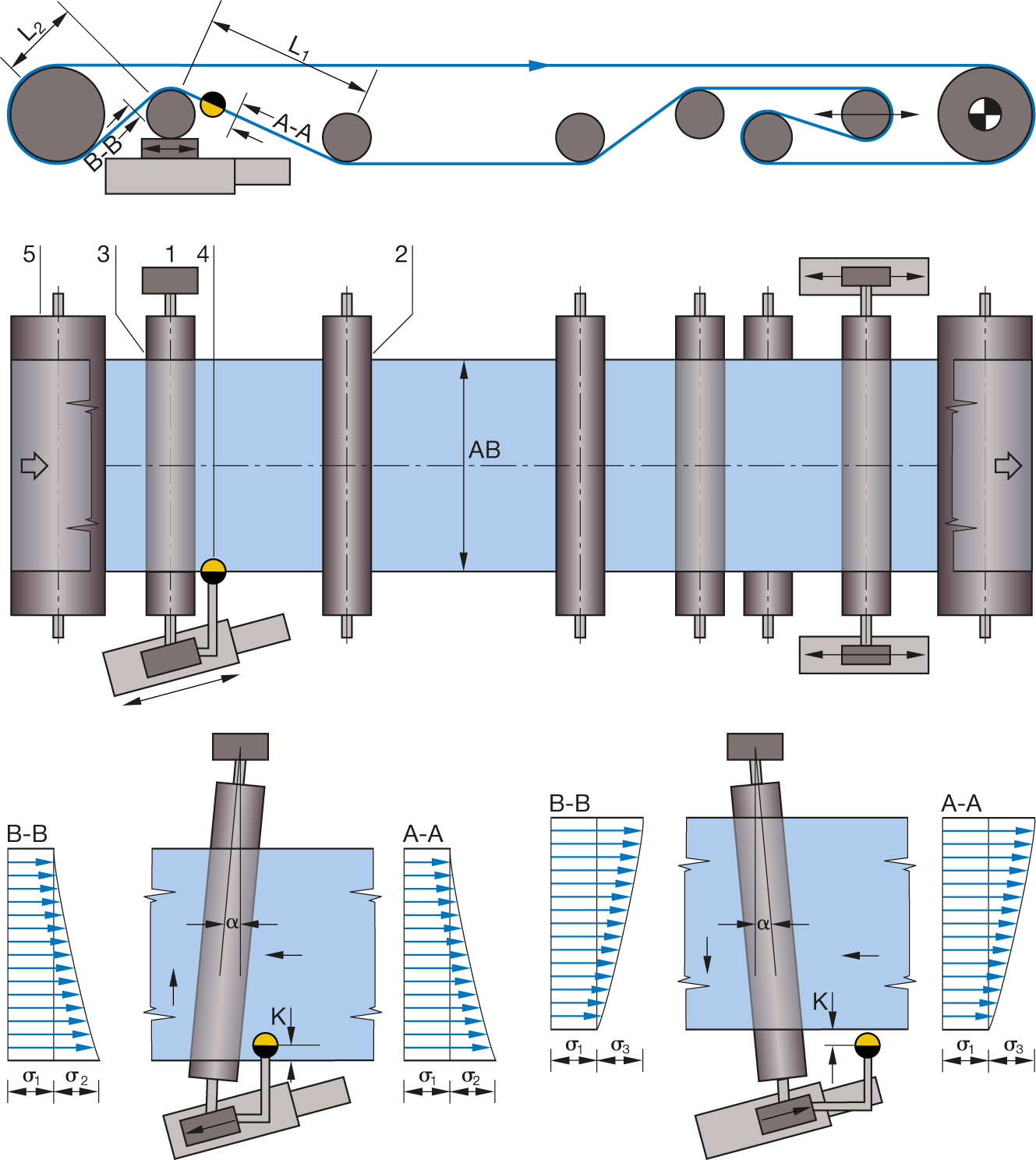
- 기능 도면
기능
롤러가 벨트 진행방향에 대해 경사인 경우, 벨트가 측방향으로 움직입니다. 이러한 작동 원리는 벨트 컨트롤을 위해 피버팅 롤러 시스템 ELBANDER에 적용됩니다. 피버팅 롤러의 회전점은 양측 베어링 포인트 중 하나입니다. 수정 요청에 따라 조절 롤러는 이 포인트를 중심으로 경사지게 배치됩니다.
사용 영역
피버팅 롤러 시스템은 특히 컨베이어 벨트의 벨트 컨트롤에 사용됩니다..
어플리케이션
컨베이어 벨트의 경우 피버팅 롤러는 하단 벨트에서 헤드 롤러 바로 앞에 설치해야 합니다. 포지셔닝 장치는 벨트 진행방향에 대해 15° 미만의 각도로 배치해야 합니다. 조절 동작은 인피드 길이와 아웃피드 길이 사이의 이등분선에서 이루어져야 합니다. 인피드 길이는 최소한 벨트 폭에 해당해야 합니다. 아웃피드 길이는 가능한 한 짧게 설정해야 합니다. 조절 롤러는 40° ~ 60° 사이에서 감겨야 합니다. 생산 속도가 1000m/min를 초과하는 경우 감김 각도는 10° ~ 20°로 줄여야 합니다. 위치는 조절 롤러 바로 앞에서 에지 센서를 통해 측정됩니다. 벨트 컨트롤 시스템에서 텐션 롤러에 의해 발생할 수도 있는 장애를 방지하기 위해, 이것을 축에 평행하게 조절해야 합니다.
범례
A = 인피드에서 벨트 장력 분포 | B = 아웃피드에서 벨트 장력 분포 | K = 벨트 위치 수정 | σ = 수정각 | σ1 = 벨트 기본 장력 | σ2 = 좌측으로의 조절동작 시 장력 분포 | σ3 = 우측으로의 조절동작 시 장력 분포 | 1 = 회전점 | 2 = 인피드 롤러 | 3 = 조절 롤러 | 4 = 센서 | 5 = 고정 롤러 | L1 = 인피드 길이 | L2 = 아웃피드 길이 | AB = 작동 폭






