E+L 焦點
自動化和視覺系統
圖例說明
A = 進料口上的輸送帶張力分佈 | B = 出料口上的輸送帶張力分佈 | K = 輸送帶糾偏 | α = 糾偏角度 | σ1 = 輸送帶基本張力 | σ2 = 透過向左的調節移動實現張力分佈 | σ3 = 透過向右的調節移動實現張力分佈 | 1 = 旋轉點 | 2 = 進料滾筒 | 3 = 調節滾筒 | 4 = 感測器 | 5 = 固定滾筒 | L1 = 進料長度 | L2 = 出料長度 | AB = 工作寬度
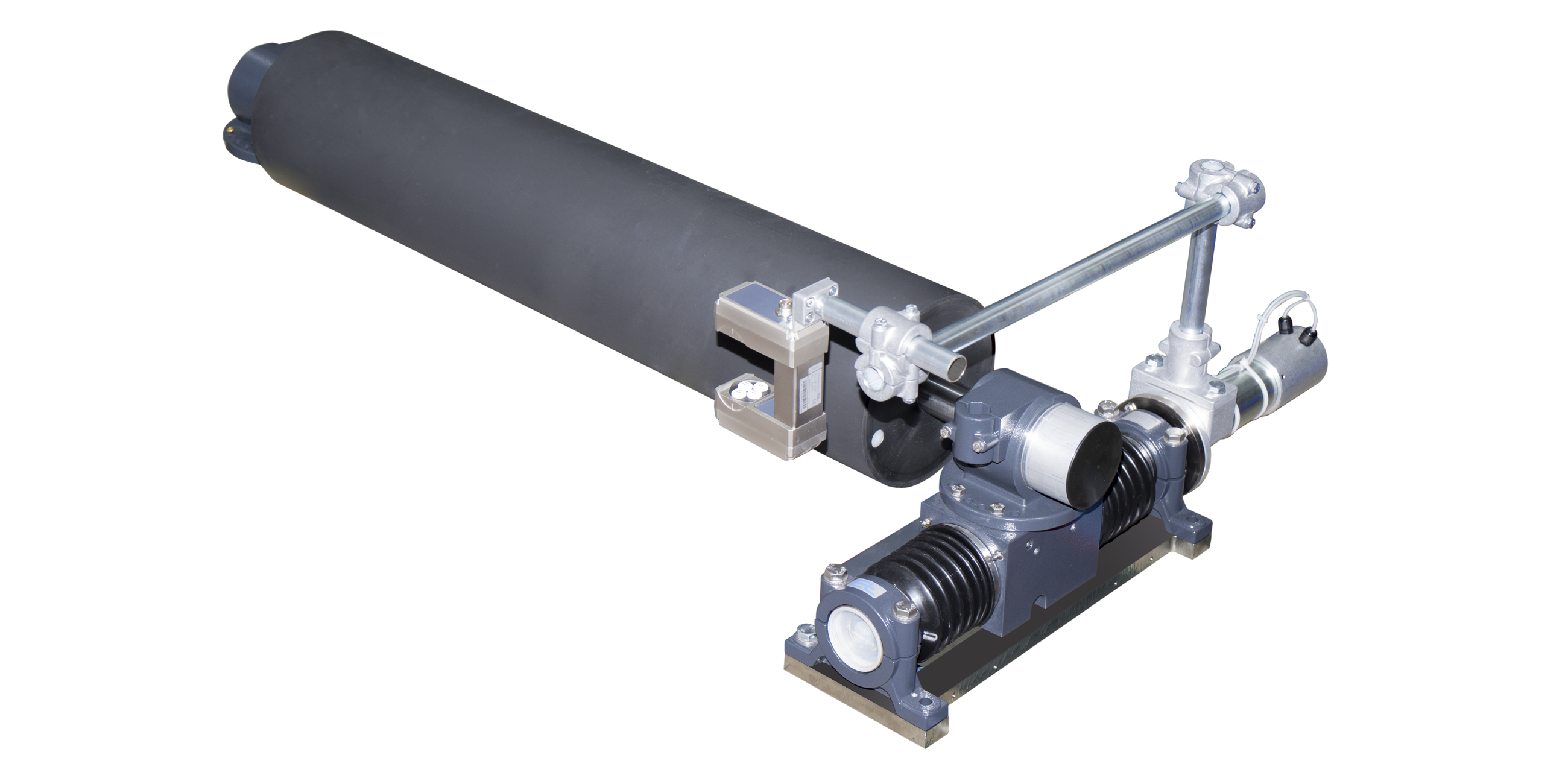
回轉滾筒系統 ELBANDER VGS14
精密型回轉滾筒系統採用無接觸式探邊和精密的修正,透過含有線性導正器、自鎖式梯形螺桿和轉矩支架的執行器
轉滾筒系統 ELBANDER VGS18
精密型回轉滾筒系統採用無接觸式探邊
轉滾筒系統 ELBANDER VGS24
精密型回轉滾筒系統和精密的修正,透過含有線性導正器、自鎖式梯形螺桿和轉矩支架的執行器
轉滾筒系統 ELBANDER VGS36
精密型回轉滾筒系統採用無接觸式探邊,並且調節滾筒由軸承單獨支承在滾輪上,可承受高載荷
電眼和相機
機電式探邊電眼 FM 31
具有類比訊號輸出端的機電式探邊電眼,用於傳送帶的機械邊緣檢測
機電式探邊電眼 FM 04
機電式探邊電眼,用於潮濕區的三點控制,用於接觸式掃描幅面
控制和操作設備
操作 DO 40
具有直覺性操作員引導的人機介面,幅面導正系統的視覺化和操作
File size exceeds the maximum limit of: